ناوگان رباتیک هوشمند و خودران تنب
راه حل نوین برای گسترش فرآیند های تولید و لجستیک
ناوگان رباتیک
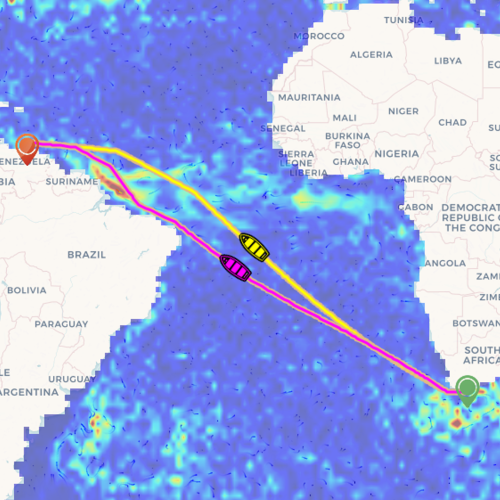
نرمافزار بهینه سازی سفر دریایی
راهکار نوین کاهش مصرف سوخت شناور تا 5%
بهینه سازی سفر های دریایی
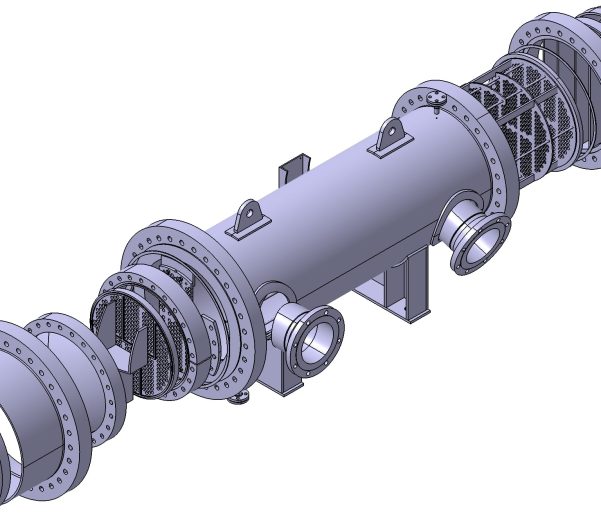
طراحی پارامتریک
راه حل نوین بهینه سازی هندسه، سریعتر و ساده تر
طراحی پارامتریک
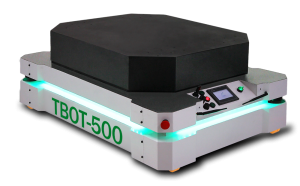
توسعهی سیستمهای هوشمند، صنعت چهارم و اینترنت اشیاء، بستری مناسب جهت به کارگیری رباتهای هوشمند در صنایع مختلف ایجاد نمـوده است. ربات هوشمنـد و خـودران 500-TBOT با استفاده از به روزترین فناوریهای صنعت رباتیک، طراحی و تولیـد شده تا با کمترین میزان تغییرات محیطی، کارایـی فرآیندها را افزایش دهد. این ربات از دسته رباتهـای AMR بوده که بر خلاف انـواع AGV که بر روی خطوط از پیش تعیین شده حرکت میکنند، به صورت خودکار مسیر خود را در محیط مشخص مینماید.
ناوگان رباتیک هوشمند و خودران تنب وارد بزرگ ترین شرکت خودرو سازی ایران گردید
کاملاً خودران
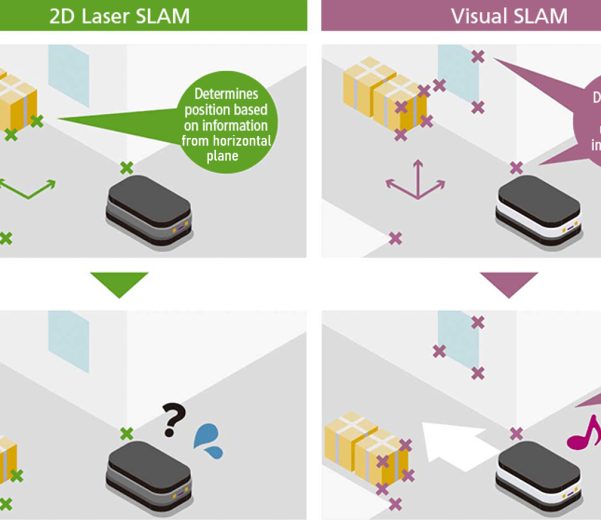
ربات TBOT-500 نقشه محیط را تهیه کرده و بدون نیاز به نصب هیچ گونه علایم و ادوات محیطی، مسیر یابی میکند.
اتصال یکپارچه
قابل اتصال به سامانه هوشمند مدیریت ناوگان رباتیک تنب و سایر ادوات متصل با اینترنت اشیاء (IoT)
دید 360º
سنسورهای لیزری (Lidar) و دوربین سه بعدی، دید کاملی از محیط اطراف به TBOT-500 میدهد.
500 کیلوگرم
با بهره مندی از سیستم بالابر پرقدرت، TBOT-500 قادر است تا پالتها را با وزن حداکثر 500 کیلوگرم جابجا نماید.
تا 8 ساعت
با استفاده از باتری لیتیومی با ظرفیت بالا، ربات TBOT-500 تا حداکثر 8 ساعت با یکبار شارژ قادر به حمل بار خواهد بود.
خدمات ما
سامانه مدیریت هوشمند
ناوگان رباتیک تنب
با توسعه سیستمهای متصل و صنعت 4.0، استفاده از رباتها و تعامل آنها با محیط اطراف رشد شگرفی داشته است. از این رو توسعه سامانههای کنترلی جهت به کارگیری بهینه رباتها در یک محیط و مدیریت ارتباط آنها با یکدیگر، ضروری است. سامانه مدیریت هوشمند ناوگان رباتیک تنب قادر است تا مجموعهای از رباتهای خودران (خصوصاً سری رباتهای TBOT) را به صورت کاملاً اتوماتیک کنترل و مدیریت نماید. این سامانه به صورت دستی (و یا با اتصال به سایر سامانهها از طریق API) کارها را دریافت کرده و پردازش مینماید. کارها پس از پردازش به ترتیب اولویت و بر حسب توانایی ربات، نزدیکی آن به بار، میزان شارژ و … به مناسبترین ربات سپرده میشود.
علاوه بر ارتباط با ناوگان رباتیک و مدیریت وظایف، این سامانه به سایر ادوات متصل به اینترنت اشیاء (مانند دربها، تسمه نقالهها و…) نیز متصل شده و انجام کارها توسط ربات را با این ادوات هماهنگ مینمایند.با جمعآوری اطلاعات از رباتها حین حرکت در محیط و پردازش آنها، مسیر رباتها بهینه شده تا با کمترین میزان پیمایش، حجم بیشتری از کار انجام شود. در عین حال، با توزیع حرکت رباتها در محیط از بروز هرگونه ترافیک و مسدودی مسیر جلوگیری مینماید.
")